Predict maps of AGBD based on inventory and LiDAR data
Dominique Lamonica
2026-07-24
Source:vignettes/Vignette_predict_map_AGBD.Rmd
Vignette_predict_map_AGBD.RmdOverview
BIOMASS enables users to predict AGBD maps at the landscape level, with uncertainties per pixel. For that, both inventory and LiDAR data are required.
To predict AGBD maps, we are going to calibrate a model describing the relationship between AGBD estimated at plot level, and the corresponding value of one LiDAR metric (a Canopy Height Model - CHM, for example). Once this model has been calibrated using AGBD and CHM values of each plot, AGBD is computed for each pixel of the landscape based on the LiDAR metric value at the pixel, according to the model.
In order to easily propagate AGBD uncertainties that have been propagated through the previous steps in BIOMASS model calibration and prediction is done within Bayesian framework using brms package. Since prediction can be quite time consuming, depending on landscape size and chosen resolution, it is possible to run parallel using doFuture package, see below “Run prediction in parallel” section.
Mathematical modelling
The model we chose to describe the relationship between plot-level AGBD and LiDAR metrics is a log-log regression, with a Gaussian error model. To capture the spatial structure that may exists in the data, we use a Spatially Varying Coefficient (SVC) regression with Gaussian random fields (see Gelfand et al., 2003 and Hunka et al., 2025).
The general equation can be written as follow, for a subplot :
where , the covariance matrix, is defined by the Màtern kernel between two locations and :
is the distance between locations and , parameter controls the magnitude and parameter the range of the kernel.
In our case stands for the logarithm of plot-level AGBD, while is the logarithm of a LiDAR metric measurement for the corresponding plot, for instance the mean of the Canopy Height Model on the plot surface. The intercept can be removed from the model (as by default).
Warning on vignette example
In order to keep this vignette light and usable, the procedure is displayed and illustrated using a very small dataset. The dataset comprises 4 one hectare plots, the plots being very close together in space, and the CHM raster of the rectangular extent around the plots, at 1m resolution, as LiDAR data. Obviously, predicting biomass map on such a small landscape does not make sense. However, predicting a sensibly larger map based on the same plot data would not be better since it is definitely not enough, both in terms of data quantity and spatial arrangement quality, to obtain robust and reliable final predictions! So keep in mind that this data case scenario is only here to illustrate the functions.
You may run some quick quality checks to assess if a dataset is appropriate for such a regression, e.g. looking at CHM distribution against tree height distribution, checking LiDAR metric range in your calibration dataset vs. in the entire landscape, looking at the plots spatial arrangement in the landscape, checking that pairwise distances between inventory plots are more or less regularly distributed along the range.
Previous steps
Those steps of the procedure are detailed in the two other vignettes.
Load inventory, plot coordinates and LiDAR data
data("NouraguesTrees")
data("NouraguesCoords")
nouraguesRaster <- terra::rast(system.file("extdata", "NouraguesRaster.tif",package = "BIOMASS", mustWork = TRUE))Compute AGBD
# Height
data("NouraguesHD")
brm_model <- modelHD(
D = NouraguesHD$D, H = NouraguesHD$H,
method = "log2",
bayesian = TRUE, useCache = TRUE)
# Wood density
Taxo <- readRDS(file = "saved_data/Taxo_vignette.rds")
NouraguesTrees$GenusCorrected <- Taxo$genusAccepted
NouraguesTrees$SpeciesCorrected <- Taxo$speciesAccepted
NouraguesTrees$family <- Taxo$familyAccepted
wood_densities <- getWoodDensity(
genus = NouraguesTrees$GenusCorrected,
species = NouraguesTrees$SpeciesCorrected,
family = NouraguesTrees$family,
stand = NouraguesTrees$Plot
)
NouraguesTrees$WD <- wood_densities$meanWD
error_prop_4plots <- AGBmonteCarlo(
D = NouraguesTrees$D, WD = NouraguesTrees$WD,
HDmodel = brm_model,
Dpropag = "chave2004",
errWD = wood_densities$sdWD)
# keep only 50 iterations per tree for vignette example
error_prop_4plots$AGB_simu <- error_prop_4plots$AGB_simu[,1:50]Spatialize AGBD
# divide plots into subplots
multiple_subplots <- divide_plot(
grid_size = 50,
corner_data = NouraguesCoords,
rel_coord = c("Xfield","Yfield"), proj_coord = c("Xutm","Yutm"), corner_plot_ID = "Plot",
tree_data = NouraguesTrees, tree_coords = c("Xfield","Yfield"), tree_plot_ID = "Plot"
)
#> Warning in divide_plot(grid_size = 50, corner_data = NouraguesCoords, rel_coord
#> = c("Xfield", : One or more trees could not be assigned to a subplot (not in a
#> subplot area)
# check with raster, optional
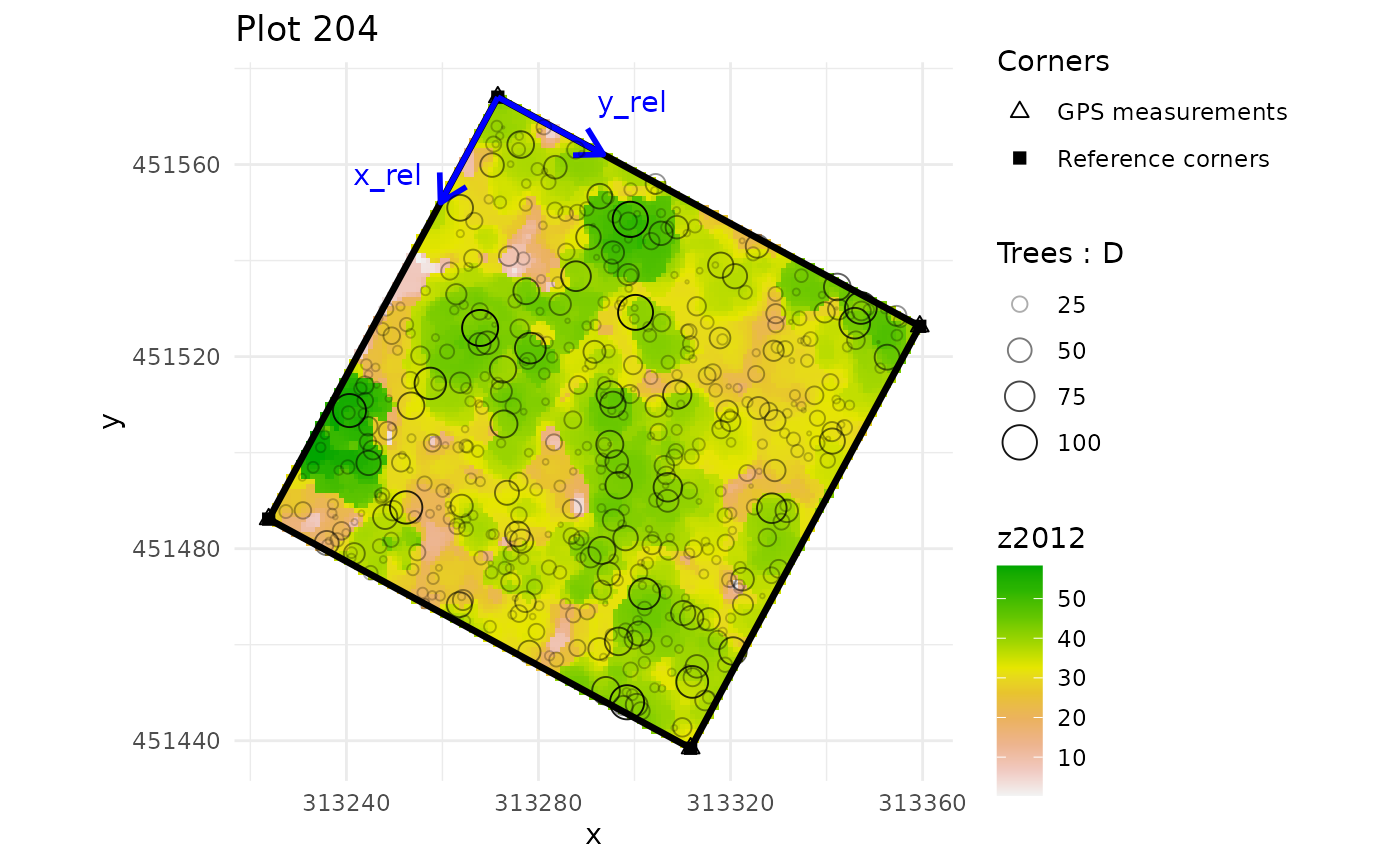
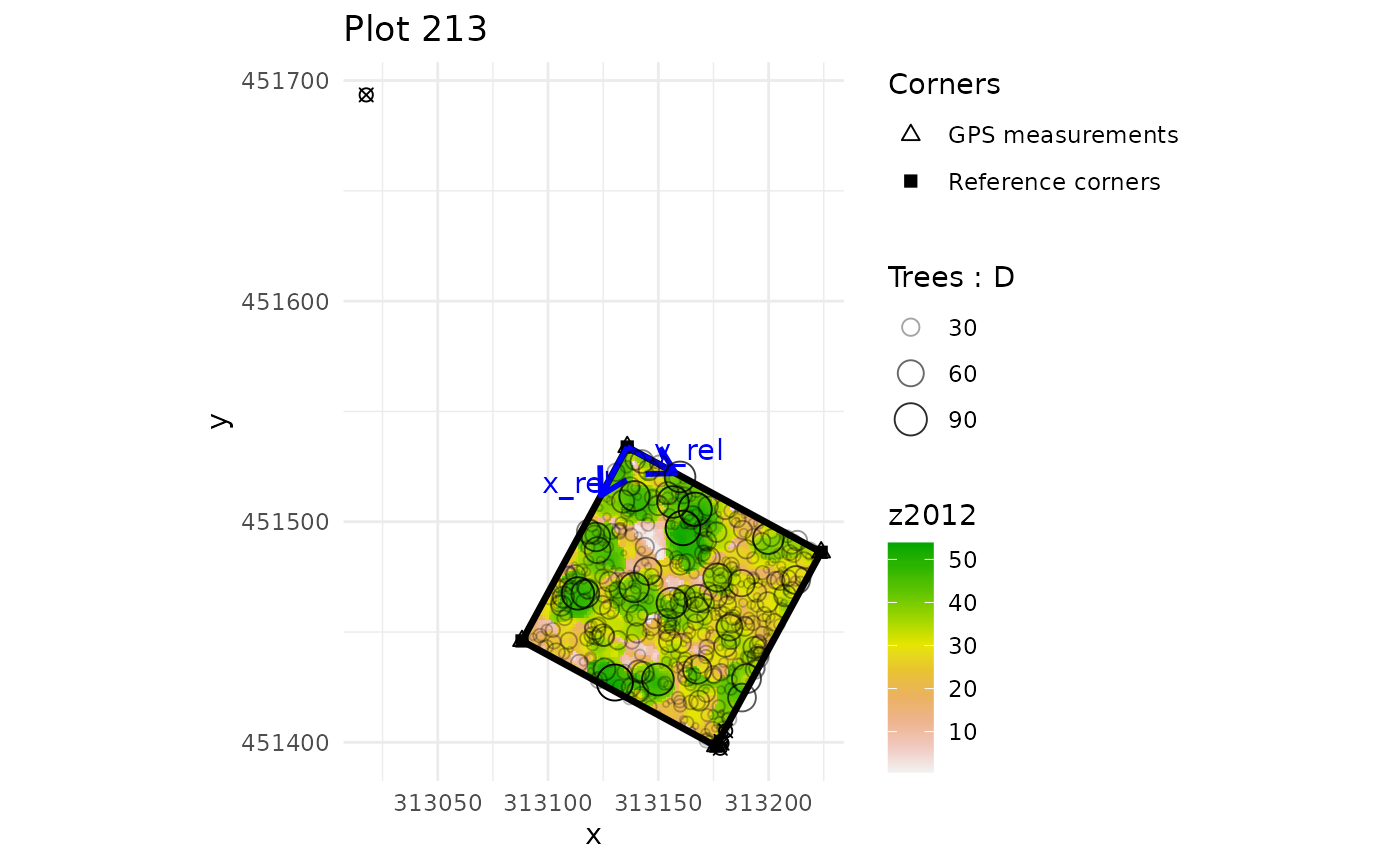
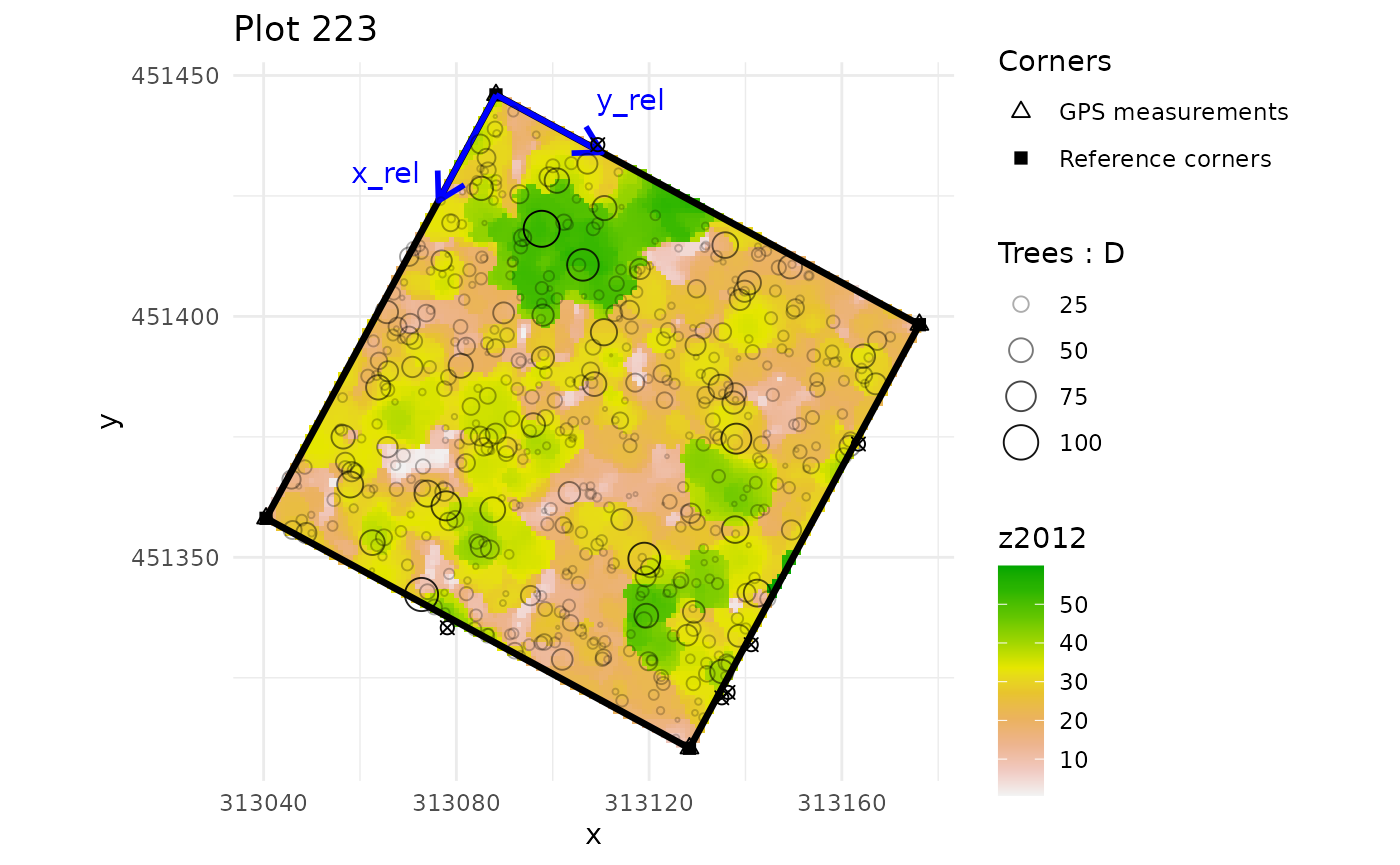
multiple_checks <- check_plot_coord(
corner_data = NouraguesCoords, # NouraguesCoords contains 4 plots
proj_coord = c("Xutm", "Yutm"), rel_coord = c("Xfield", "Yfield"),
trust_GPS_corners = TRUE,
plot_ID = "Plot",
tree_data = NouraguesTrees, tree_coords = c("Xfield","Yfield"),
prop_tree = "D", tree_plot_ID = "Plot",
ref_raster = nouraguesRaster)
#> In plot 201 : Be careful, one or more trees are not inside the plot defined by rel_coord (see is_in_plot column of tree_data output)
#> In plot 213 : Be careful, one or more trees are not inside the plot defined by rel_coord (see is_in_plot column of tree_data output)
#> In plot 223 : Be careful, one or more trees are not inside the plot defined by rel_coord (see is_in_plot column of tree_data output)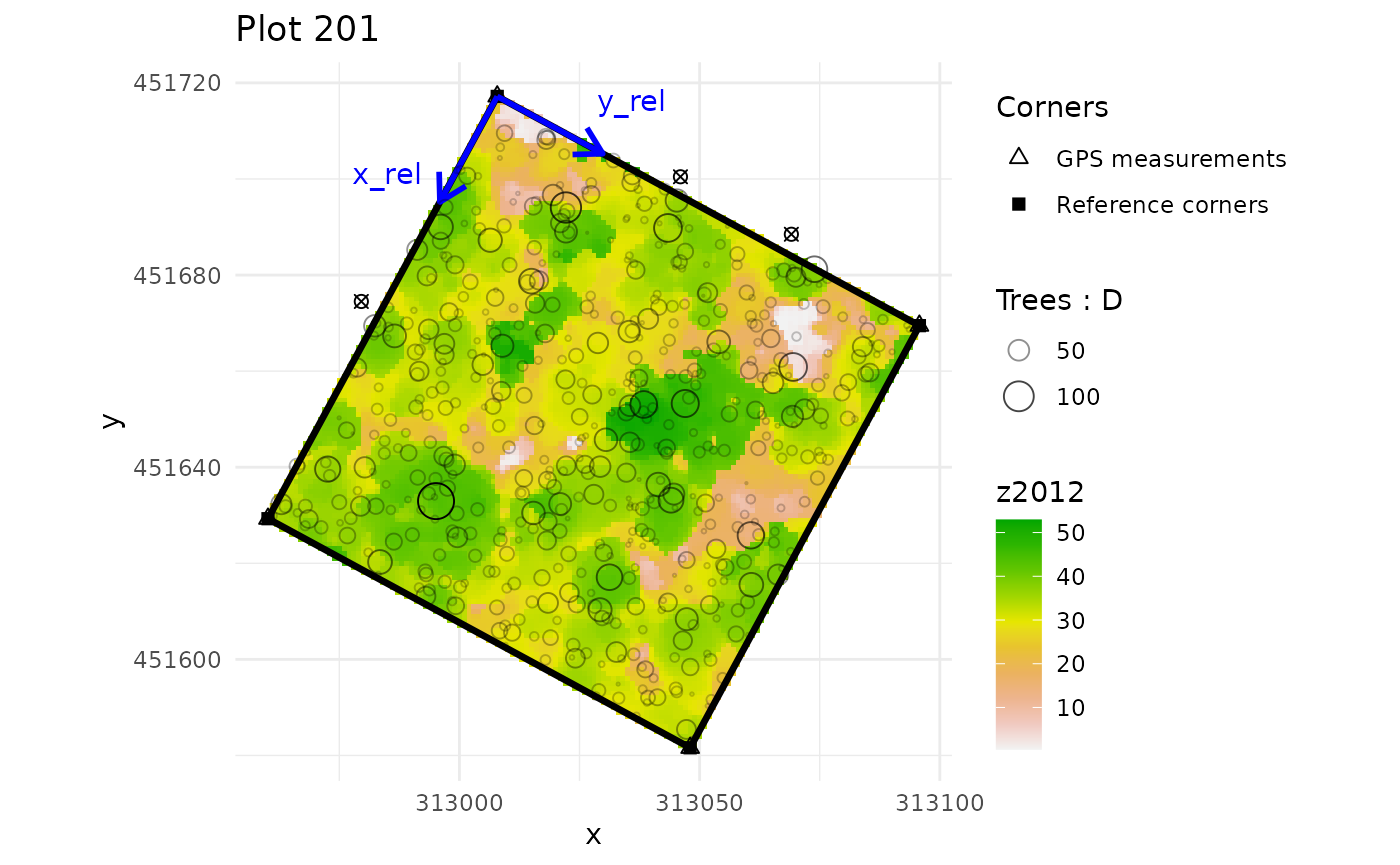
# compute AGBD estimates and their uncertainty per subplot
subplot_AGBD <- subplot_summary(
subplots = multiple_subplots,
AGB_simu = error_prop_4plots$AGB_simu, draw = F
)
#> AGB uncertainties will be propagated without propagation of corner GPS measurement uncertainties.Spatialize LiDAR metric
# quick plot to visualise plot corners in the landscape
terra::plot(nouraguesRaster)
points(NouraguesCoords$Xutm, NouraguesCoords$Yutm, col ="red", pch = 20)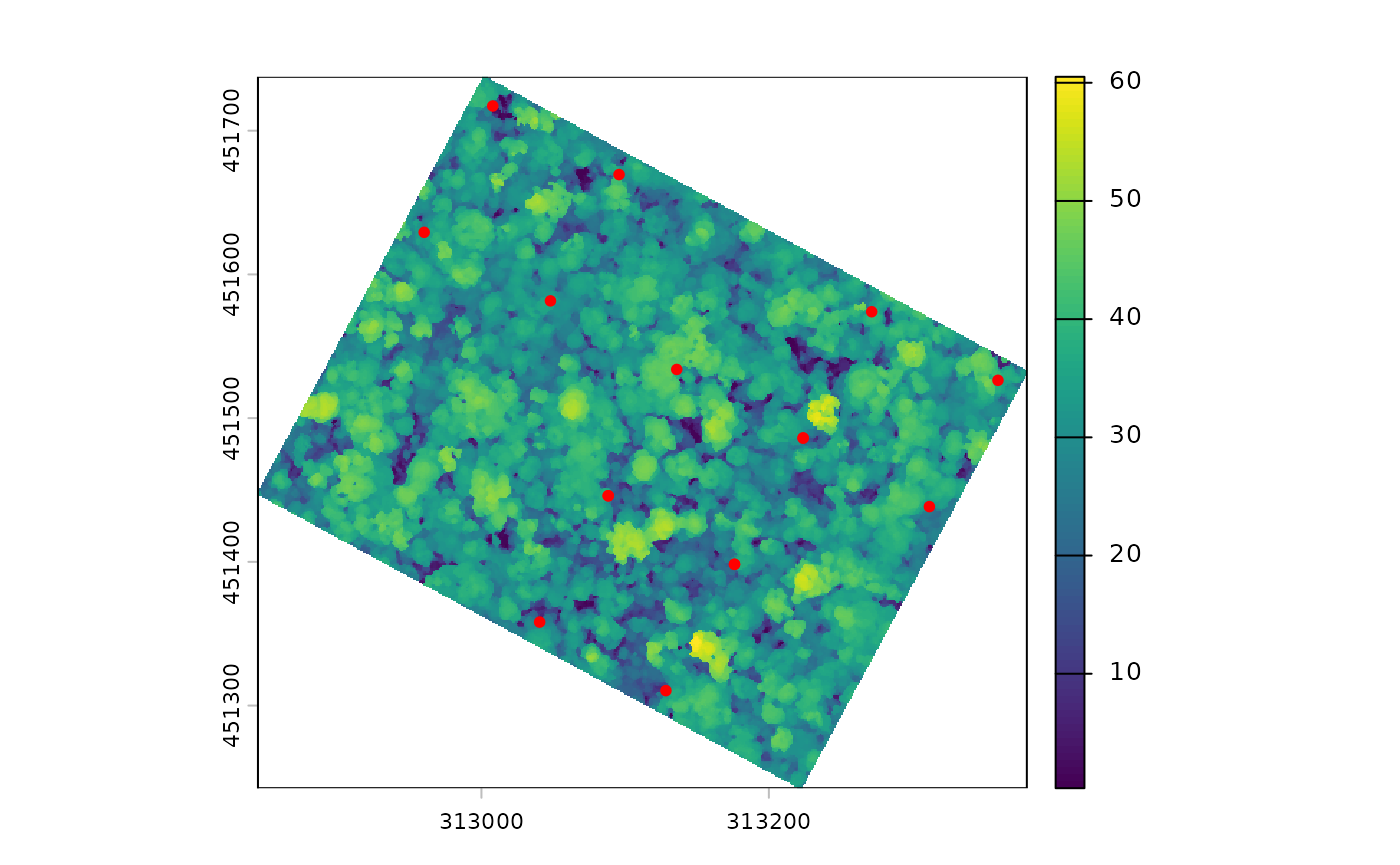
# get CHM median values for each suplot
raster_summary <- subplot_summary(
subplots = multiple_subplots,
ref_raster = nouraguesRaster, raster_fun = median, na.rm = T)
#> Extracting raster metric...Extracting raster metric done.
#> [[1]]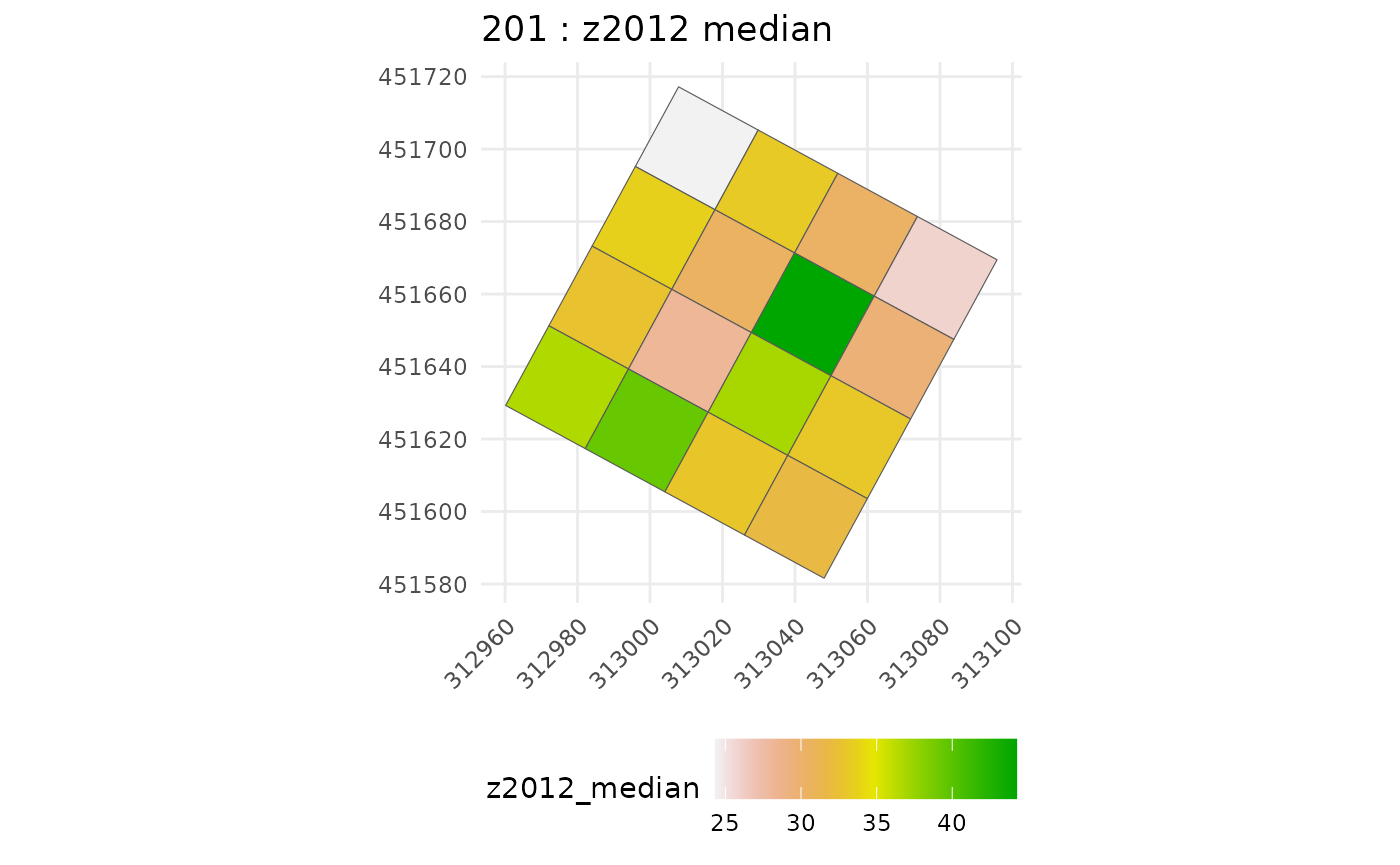
#>
#> [[1]]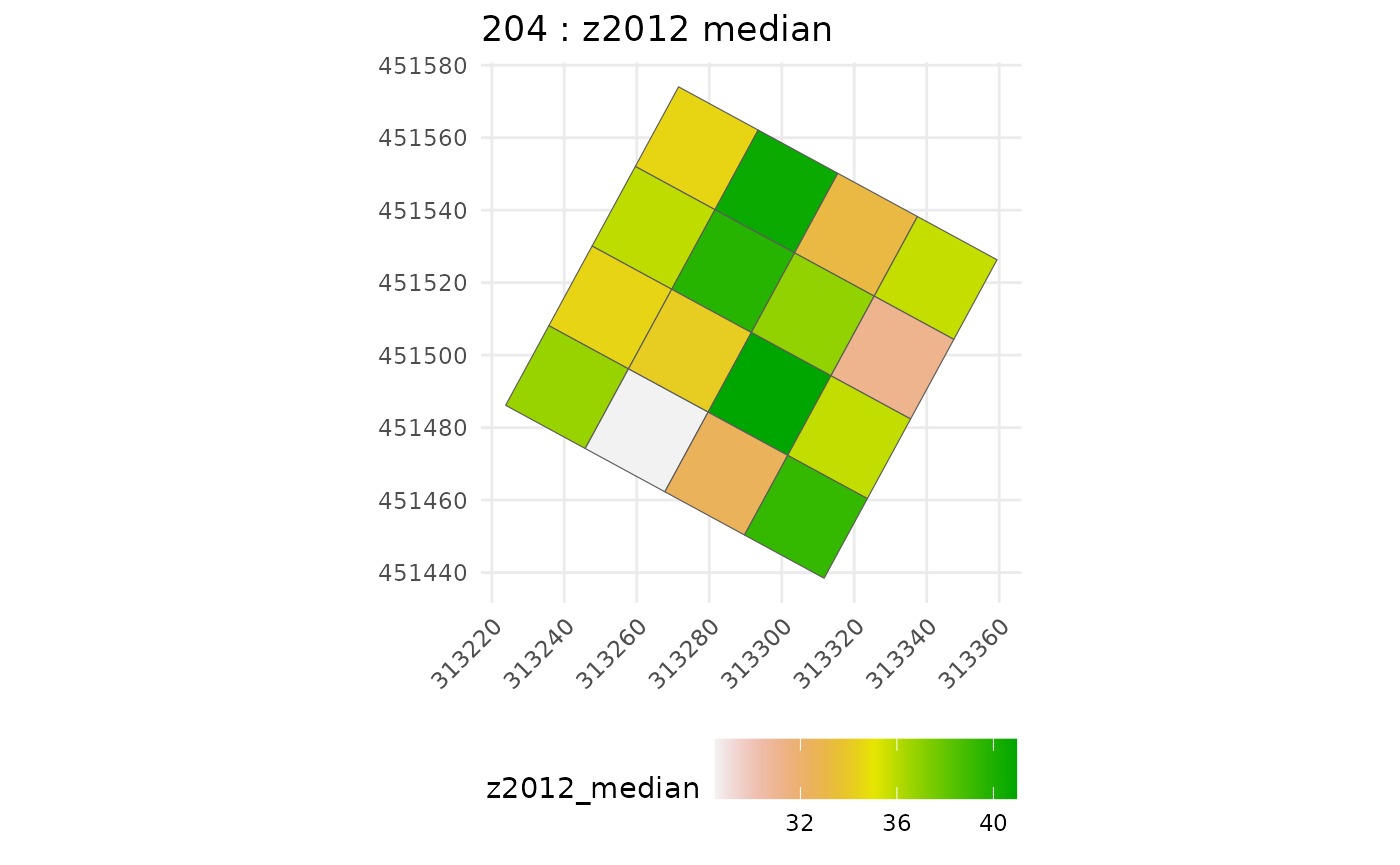
#>
#> [[1]]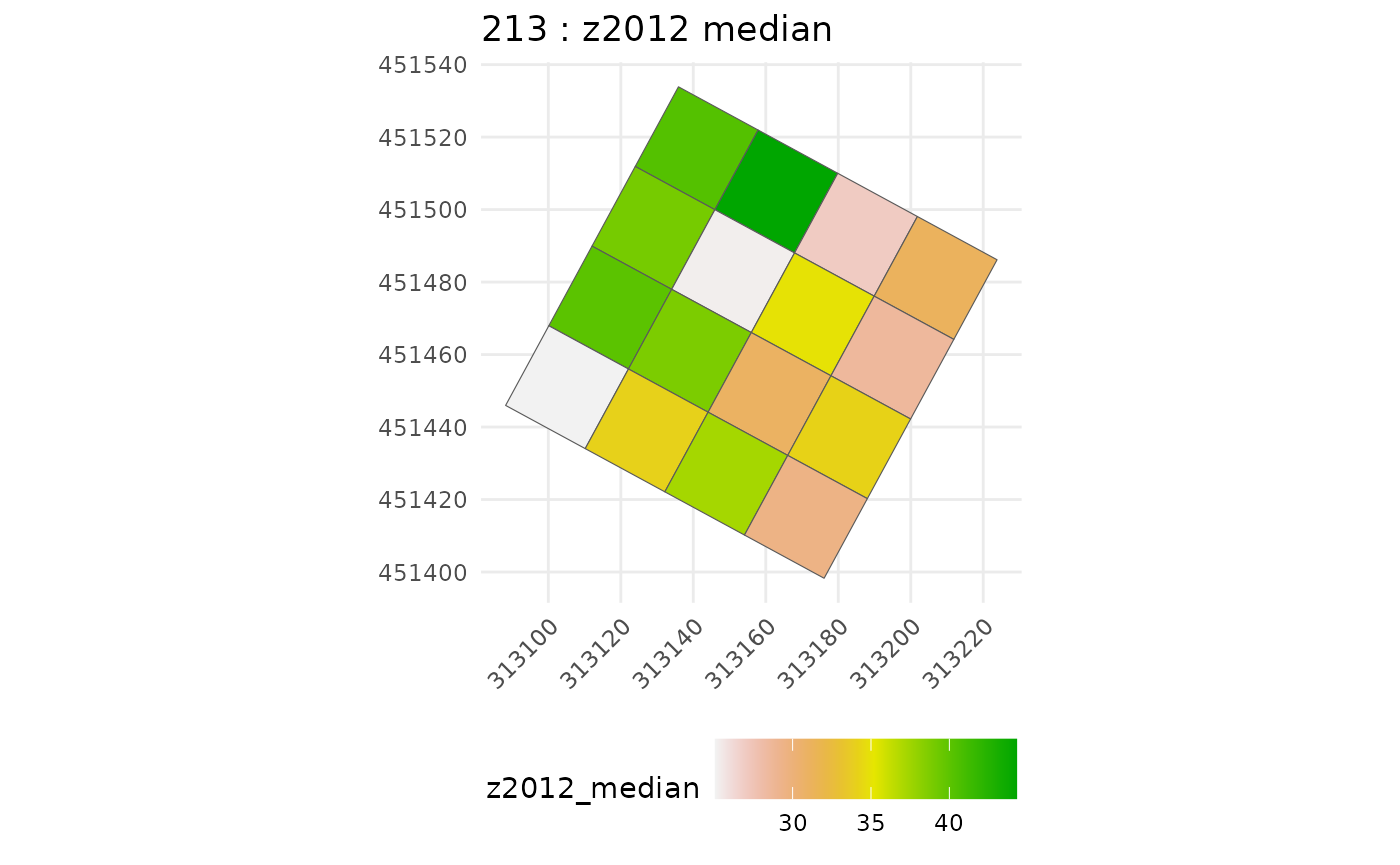
#>
#> [[1]]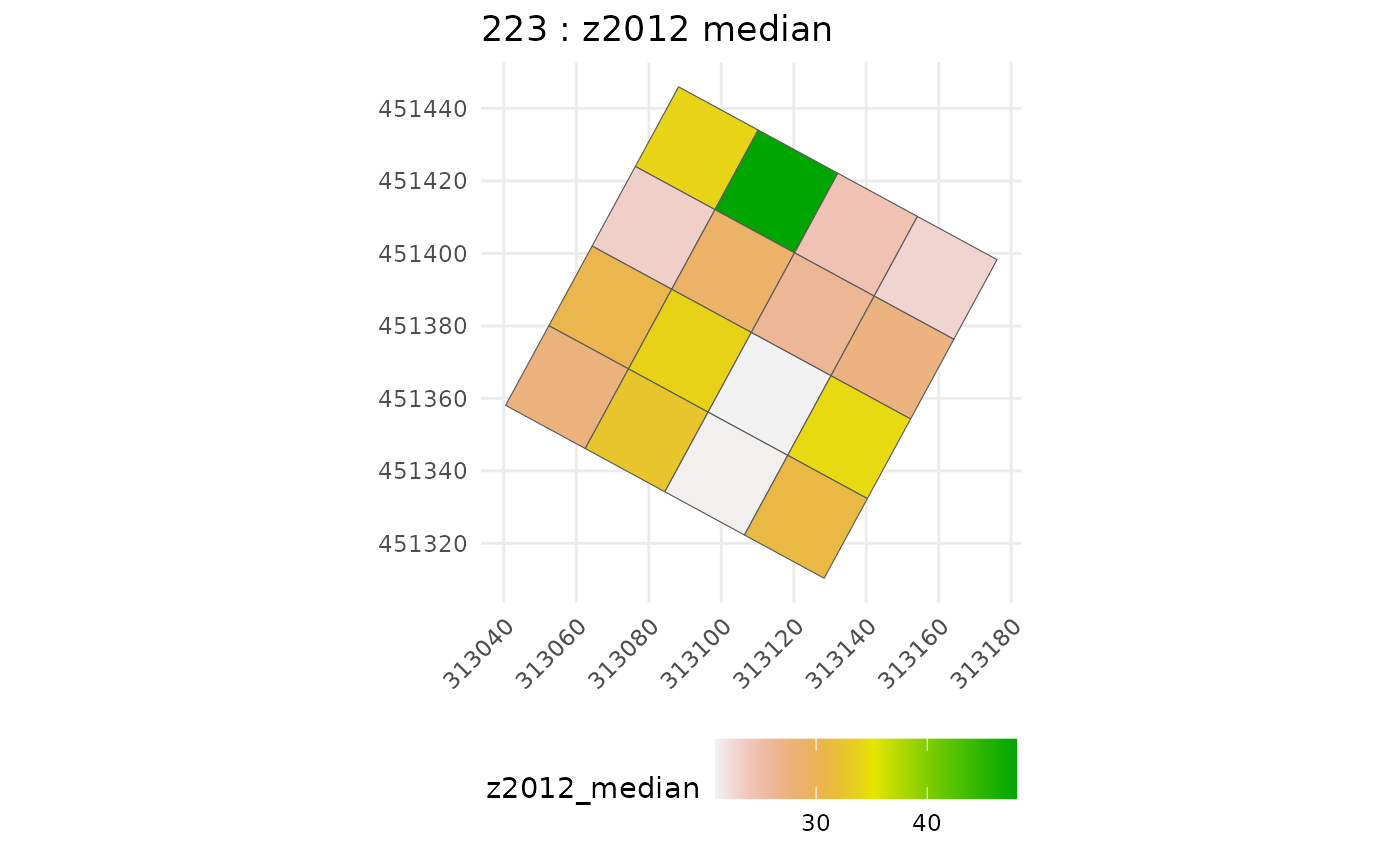
chm_subplot <- raster_summary$tree_summary |>
rename(raster_metric = z2012_median)Calibrate model
Gather data for agbd-chm model inference (i.e. join predictor-predicted):
agbd_subplot <- subplot_AGBD$long_AGB_simu
dt_inf <- agbd_subplot %>%
left_join(chm_subplot, by = "subplot_ID") %>%
arrange(subplot_ID)then run calibration function, here parallelized on 4 CPUs thanks to
argument cores set to 4, and without the intercept
(argument intercept set to FALSE):
model_cal <- calibrate_model(long_AGB_simu = dt_inf, nb_rep = 50, useCache = T,
plot_model = FALSE, intercept = FALSE, chains = 4,
thin = 10, iter = 3500, warmup = 1500, cores = 4)Let’s check inference results:
summary(model_cal)
#> Warning: There were 1 divergent transitions after warmup. Increasing
#> adapt_delta above 0.9 may help. See
#> http://mc-stan.org/misc/warnings.html#divergent-transitions-after-warmup
#> Family: gaussian
#> Links: mu = identity
#> Formula: log_AGBD ~ 0 + betatilde * log_CHM
#> betatilde ~ 1 + gp(x, y, gr = T, scale = T, cov = "matern32")
#> Data: dt_inf (Number of observations: 800)
#> Draws: 4 chains, each with iter = 3500; warmup = 1500; thin = 10;
#> total post-warmup draws = 800
#>
#> Gaussian Process Hyperparameters:
#> Estimate Est.Error l-95% CI u-95% CI Rhat Bulk_ESS
#> sdgp(betatilde_gpxy) 0.05 0.02 0.03 0.10 1.00 869
#> lscale(betatilde_gpxy) 0.21 0.08 0.10 0.43 1.00 872
#> Tail_ESS
#> sdgp(betatilde_gpxy) 774
#> lscale(betatilde_gpxy) 816
#>
#> Regression Coefficients:
#> Estimate Est.Error l-95% CI u-95% CI Rhat Bulk_ESS Tail_ESS
#> betatilde_Intercept 1.72 0.03 1.67 1.80 1.00 749 727
#>
#> Further Distributional Parameters:
#> Estimate Est.Error l-95% CI u-95% CI Rhat Bulk_ESS Tail_ESS
#> sigma 0.10 0.00 0.09 0.10 1.00 824 860
#>
#> Draws were sampled using sampling(NUTS). For each parameter, Bulk_ESS
#> and Tail_ESS are effective sample size measures, and Rhat is the potential
#> scale reduction factor on split chains (at convergence, Rhat = 1).The parameters to be read in the summary are the following:
- sdgp(betatilde_gpxy) is the magnitude of the covariance kernel,
- lscale(betatilde_gpxy) is the range of the covariance kernel (in the distance unit you have chosen),
- betatilde_Intercept is the fixed part of the regression coefficient,
- sigma is the Gaussian residual standard deviation of the predicted variable (do not forget it is log scaled).
Joint posterior distribution values (for our 4 parameters of
interest) are available through the following brms
function:
draws_fit <- as_draws_df(model_cal)[,1:4]To properly use inference results, it is necessary to make sure that
(i) convergence between chains is met, and (ii) parameters samples are
big enough and not autocorrelated. For that the indicators you need to
look at are (i) Rhat, which should be below 1.05, and more generally the
closest to 1.00, and (ii) Bulk and Tail ESS, which should be the closest
possible to “total post-warmup draws”. To check for within-chain
autocorrelation, you can also use the acf function from
tseries package (chain by chain, not all together), such
as:
require(tseries)
#> Loading required package: tseries
#> Registered S3 method overwritten by 'quantmod':
#> method from
#> as.zoo.data.frame zoo
#>
#> Attaching package: 'tseries'
#> The following object is masked from 'package:brms':
#>
#> arma
lapply(draws_fit[1:200,], acf, plot = F) # check the first chain, i.e. the first 200 rows
#> $b_betatilde_Intercept
#>
#> Autocorrelations of series 'X[[i]]', by lag
#>
#> 0 1 2 3 4 5 6 7 8 9 10
#> 1.000 -0.023 0.036 -0.086 -0.032 -0.065 -0.057 -0.010 -0.010 0.077 -0.034
#> 11 12 13 14 15 16 17 18 19 20 21
#> 0.166 0.004 -0.081 -0.046 0.074 0.020 0.008 -0.022 -0.089 0.024 -0.101
#> 22 23
#> 0.133 -0.038
#>
#> $sdgp_betatilde_gpxy
#>
#> Autocorrelations of series 'X[[i]]', by lag
#>
#> 0 1 2 3 4 5 6 7 8 9 10
#> 1.000 0.008 -0.094 -0.085 -0.024 -0.024 0.070 -0.027 0.019 -0.027 -0.093
#> 11 12 13 14 15 16 17 18 19 20 21
#> -0.004 0.032 0.020 0.081 0.013 -0.024 0.061 -0.099 -0.056 -0.007 0.010
#> 22 23
#> 0.154 -0.005
#>
#> $lscale_betatilde_gpxy
#>
#> Autocorrelations of series 'X[[i]]', by lag
#>
#> 0 1 2 3 4 5 6 7 8 9 10
#> 1.000 0.033 -0.047 -0.046 -0.104 -0.034 0.038 -0.054 -0.091 -0.058 -0.067
#> 11 12 13 14 15 16 17 18 19 20 21
#> 0.139 0.028 0.057 0.026 -0.034 -0.060 0.060 -0.101 -0.011 0.008 -0.143
#> 22 23
#> 0.076 0.000
#>
#> $sigma
#>
#> Autocorrelations of series 'X[[i]]', by lag
#>
#> 0 1 2 3 4 5 6 7 8 9 10
#> 1.000 0.033 -0.056 -0.054 0.093 -0.056 -0.014 0.003 -0.061 0.034 0.016
#> 11 12 13 14 15 16 17 18 19 20 21
#> -0.081 -0.040 0.053 0.182 -0.053 -0.025 -0.058 0.140 -0.098 -0.156 -0.104
#> 22 23
#> -0.024 -0.059Here we can see that at the first lag we have low within-chain
autocorrelation (< 0.2) for all parameters. If it was not the case,
re-inferring the model with the thin argument set to a
higher value, e.g. 20, would be beneficial.
You may also want to check correlations between estimated parameters. They are not “bad” per se, since the information is comprised in the inference output, and taken into account when predicting maps. But they may interfere with the inference march and make it difficult to converge.
require(GGally)
#> Loading required package: GGally
#>
#> Attaching package: 'GGally'
#> The following object is masked from 'package:terra':
#>
#> wrap
ggpairs(draws_fit)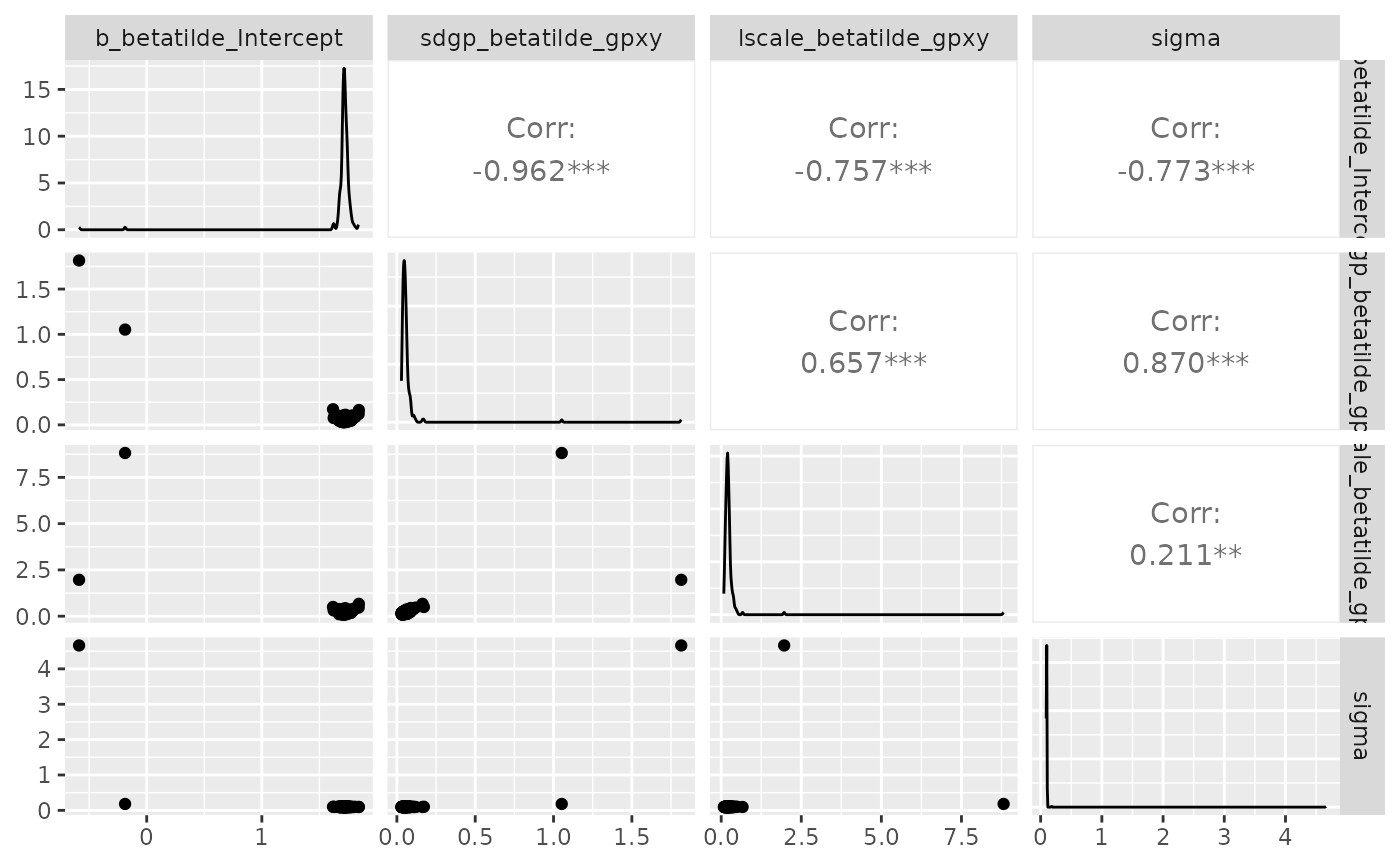
Now, let’s have a look at the posterior predictive check:
pp_check(model_cal, ndraws = 100)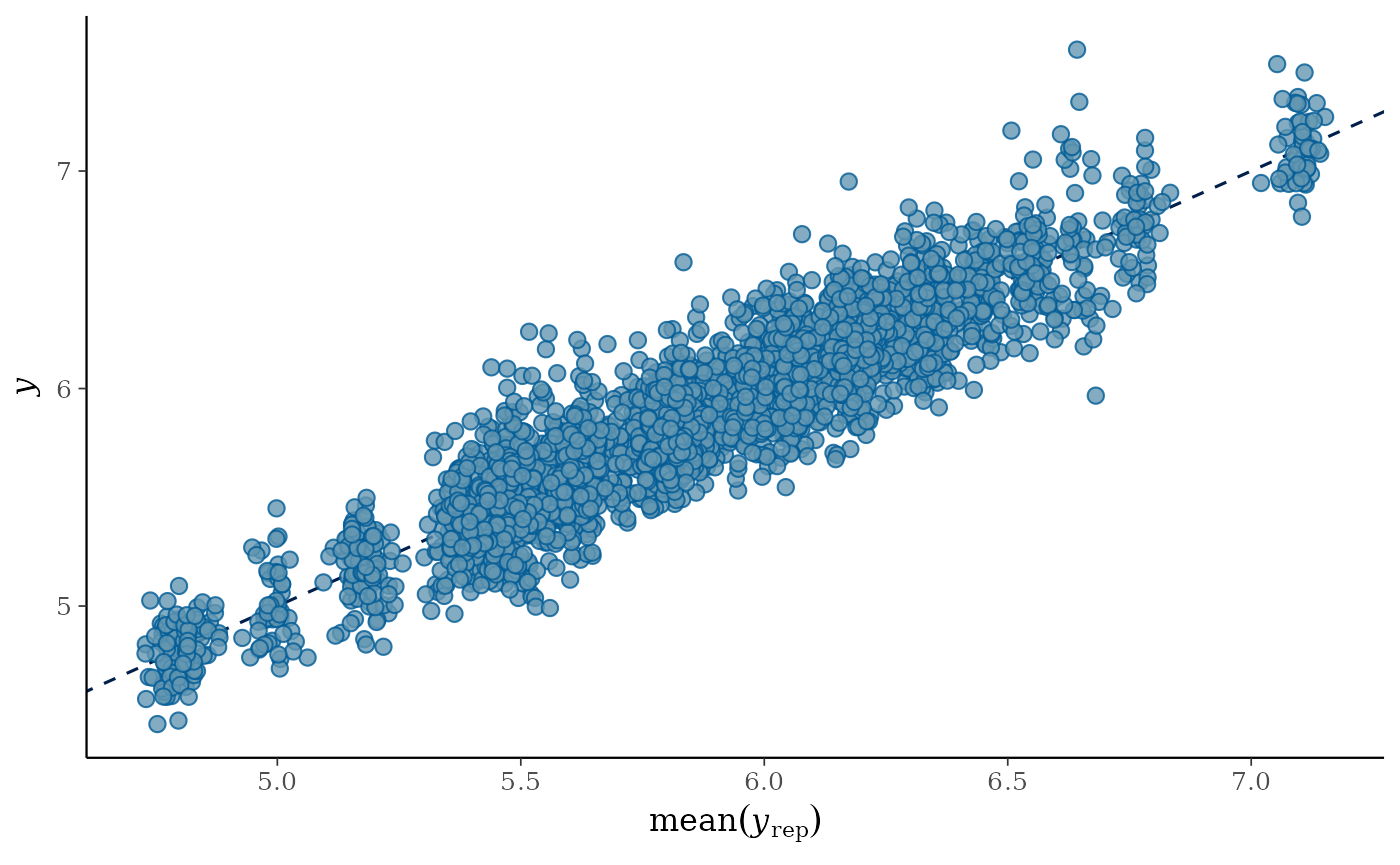
This posterior predictive check enables to quickly visualise if the
distribution of observed data y, blue bold line, matches
the distributions of data predicted by the calibrated model
y_rep, light blue lines - one per parameter draw or
combination. Hence, it is an indicator of the goodness of fit of the
model to the data.
Predict AGBD map on the LiDAR footprint
map_agbd <- predict_map(fit_brms = model_cal,
pred_raster = nouraguesRaster,
grid_size = 50,
raster_fun = median,
n_post_draws = 100,
alignment_raster = NULL,
plot_maps = F)
terra::plot(map_agbd$post_median_AGBD, main = "Median of posterior AGBD distributions")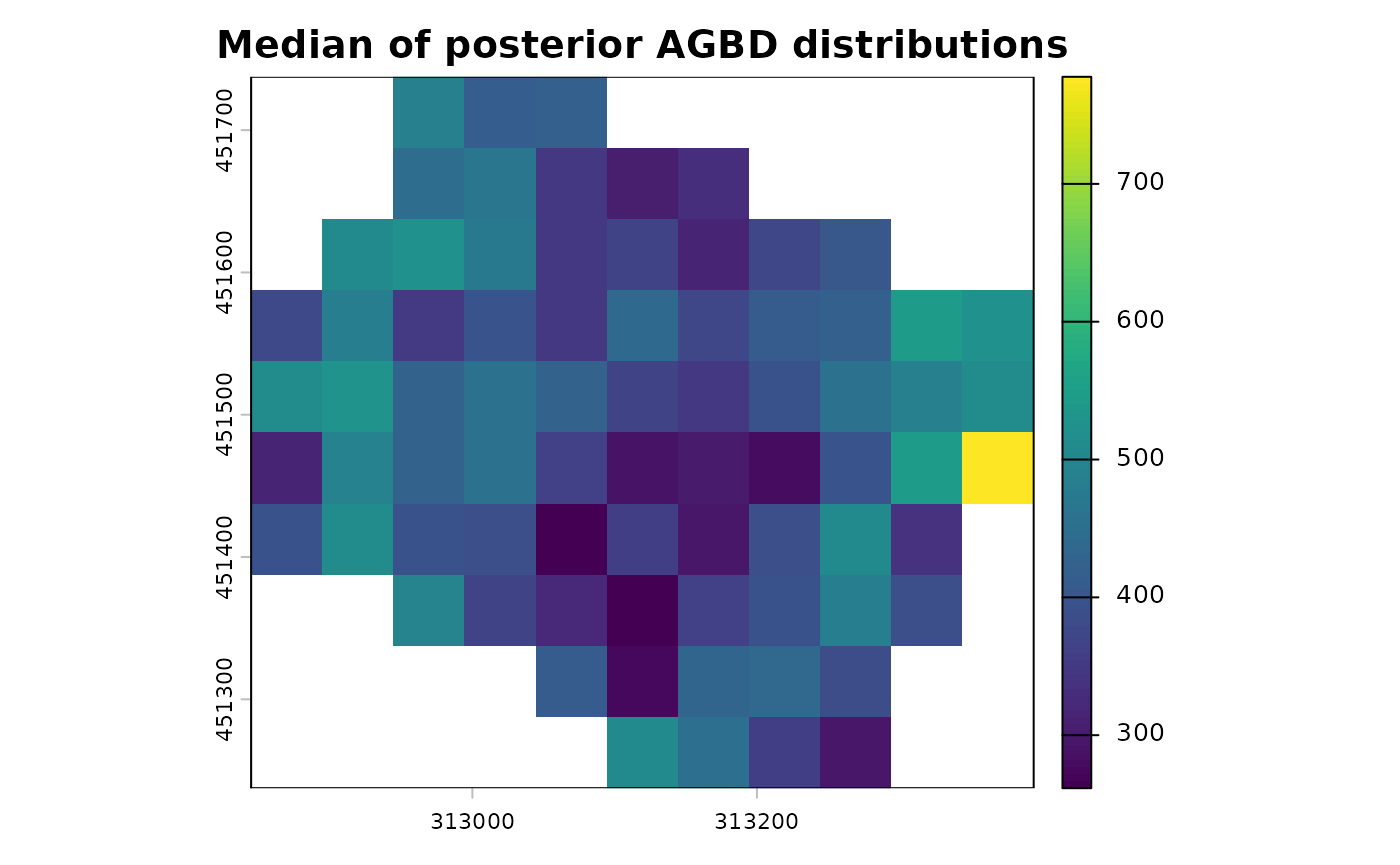
terra::plot(map_agbd$post_sd_AGBD, main = "Sd of posterior AGBD distributions")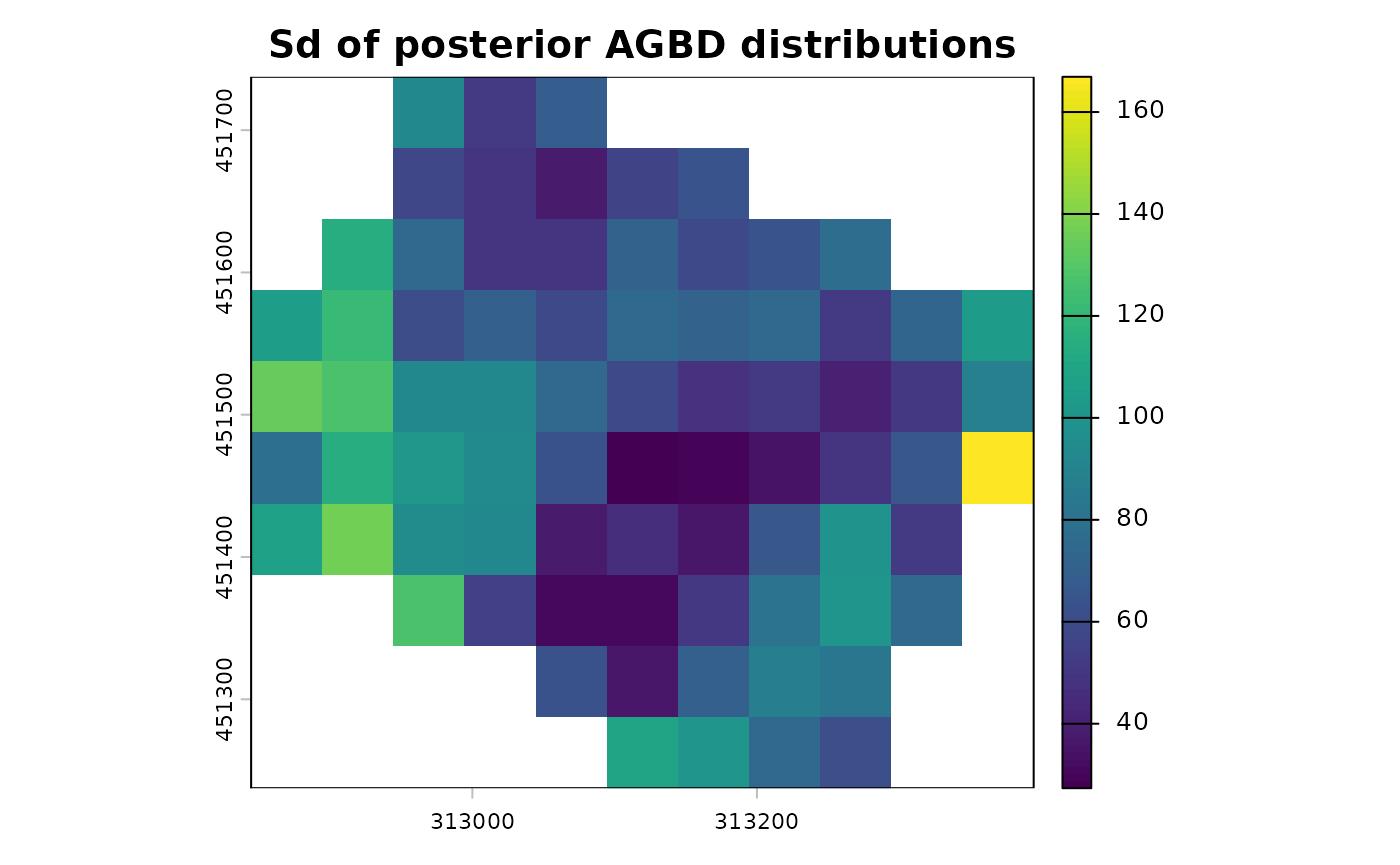
terra::plot(map_agbd$post_sd_AGBD/map_agbd$post_median_AGBD, main = "CV of posterior AGBD distributions")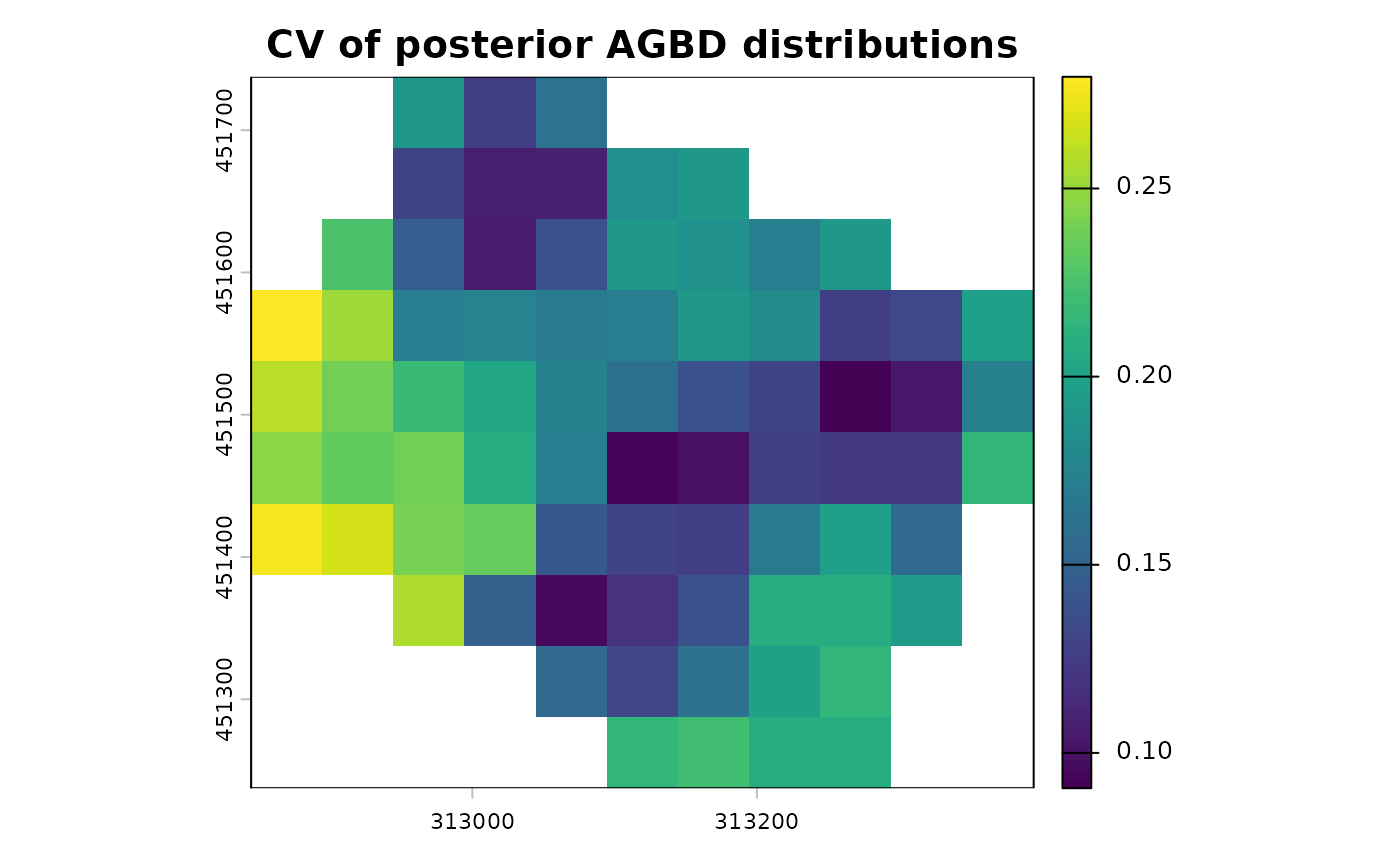
If you want to predict on another footprint, you can supply the
raster footprint with alignment_raster argument.
Run prediction in parallel
Parallelisation of predict_map function is handled by
the future framework. So to compute the map predictions in
parallel you need 1) to set the plan to
multisession with the numbers of workers, i.e.
CPUs, you want to use (before the call to predict_map
function), and 2) set the n_cores argument of
predict_map to the same number:
plan(multisession, workers = 4)
map_agbd <- predict_map(fit_brms = model_cal,
pred_raster = nouraguesRaster,
grid_size = 50,
raster_fun = median,
n_post_draws = 100,
alignment_raster = NULL,
plot_maps = F,
n_cores = 4)What about validation ?
We suggest to validate the model by subsetting your subplot dataset in two: a calibration dataset with about 70% of the subplots, and a validation dataset with the rest.
We have 4 plots divided in 4 subplots, so we need to set aside 11 subplots for the calibration step, the rest will be used to validate.
# let's select subplots for each step
set.seed(1234)
vector_of_subplots <- unique(dt_inf$subplot_ID)
calibration_subplots <- sample(vector_of_subplots, 11)
validation_subplots <- vector_of_subplots[!(vector_of_subplots %in% calibration_subplots)]
# then divide our complete dataset
dt_calibration <- dt_inf %>%
filter(subplot_ID %in% calibration_subplots)
dt_validation <- dt_inf %>%
filter(subplot_ID %in% validation_subplots) %>%
# change in column names to make predict function work
mutate(x = x_center) %>%
mutate(y = y_center) %>%
mutate(log_CHM = log(raster_metric))Now we can calibrate the model (i.e. run the inference) with the calibration dataset:
cal_step1 <- calibrate_model(long_AGB_simu = dt_calibration, nb_rep = 50, useCache = T,
plot_model = TRUE, chains = 4, thin = 10, iter = 4000,
warmup = 2000, cores = 4)Now we are going to predict the model outputs (namely AGBD) for each remaining subplot using the parameters that we inferred at step 1 when calibrating. For that we use the predict function of brms (link to help):
val_step2 <- predict(cal_step1, newdata = dt_validation[dt_validation$N_simu == 1], ndraws = 100)Now we may compare those values predicted by the model, which was calibrated with the calibration dataset, with observed values from the validation dataset:
dt_plot_val <- dt_validation %>%
group_by(subplot_ID) %>%
summarise(median_obs = median(AGBD), inf_obs = quantile(AGBD, probs = 0.025),
sup_obs = quantile(AGBD, probs = 0.975))
dt_plot_val <- cbind(dt_plot_val, AGBD_pred = exp(val_step2[,-2]))
axis_lims <- range(with(dt_plot_val, c(inf_obs, sup_obs, AGBD_pred.Q2.5, AGBD_pred.Q97.5)))
ggplot(dt_plot_val)+
geom_abline(aes(intercept = 1, slope = 1), color = "black", linetype = 2)+
geom_point(aes( x = median_obs, y = AGBD_pred.Estimate, colour = subplot_ID), shape = 1)+
geom_segment(aes(y = AGBD_pred.Estimate, yend = AGBD_pred.Estimate, x = inf_obs, xend = sup_obs, colour = subplot_ID))+
geom_segment(aes(y = AGBD_pred.Q2.5, yend = AGBD_pred.Q97.5, x = median_obs, xend = median_obs, colour = subplot_ID))+
xlab("Field derived AGBD")+
ylab("LiDAR derived AGBD")+
coord_cartesian(xlim = axis_lims, ylim = axis_lims)+
theme_minimal()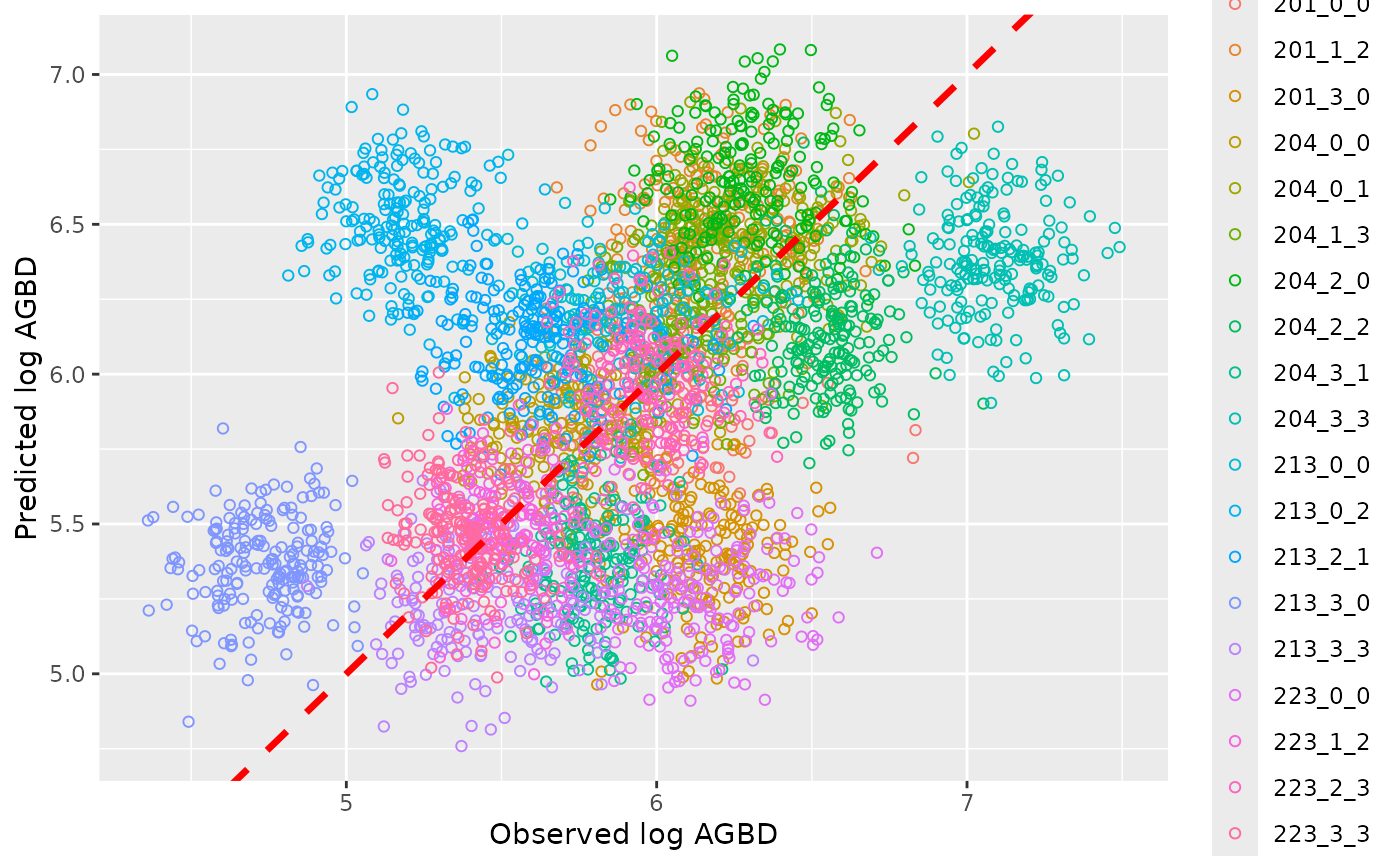
Uncertainties on the prediction are represented by the vertical segments, while the original uncertainties on data, namely subplot level AGBD, are represented by the horizontal segments, the black dotted line is the identity line. When you are good with your validation results, you infer the model with the entire dataset, and then predict a robust AGBD map.
Let’s keep in mind that in this vignette example we are working with a very small number of inventory plots: we lack of data to get robust AGBD map predictions, and properly conduct the validation step. But we encourage BIOMASS users to run that validation procedure, or another one that is suitable to your data!